

奧譜天成ATH9010助力農業生產
小麥是我國三大糧食作物(小麥、水稻、玉米)之一,是國家糧食戰略安全的關鍵。然而,作物病蟲害(常見病害有20余種)嚴重危害小麥生產安全。由小麥條銹病菌引起的條銹病爆發性爆發和區域性流行。在流行年份,條銹病可使小麥減產40%以上,甚至絕收。因此,防治小麥條銹病對糧食安全至關重要。只有準確監測小麥病害,才能有效防控,最大限度減少損失。
傳統上,農作物病害采用目視監測,存在覆蓋范圍小、調查人員主觀性強等重大局限性。因此,需要一種高效、無損的農作物病害監測方法來取代傳統方法。經過多年的發展,遙感已經成為監測農作物病害的有效技術。遙感的優勢在于可以低成本評估農作物病害的空間分布,從而更好地控制病害。
高光譜遙感是一種相對先進的技術。與多光譜技術相比,它可以提供豐富的窄帶信息。先前的研究已經討論了高光譜遙感在各種應用中相對于多光譜的優勢。高光譜技術在作物病害監測中的優勢在于它可以捕捉到由病害引起的某些生理變化(例如色素和水分含量)。在之前的研究中,許多作物病害已經通過高光譜遙感進行了監測,包括小麥黃銹病、白粉病、鐮刀菌赤霉病、花生葉斑病、番茄斑萎病毒和水稻細菌性葉枯病。
植被指數(VI)在之前的研究中已顯示出良好的作物病害監測性能,VI 對病害引起的葉片內部生理變化很敏感,但不能代表葉片表面特征的變化。紋理是一種反映病害引起的外部變化的特征,已被證明在作物病害監測中具有良好的性能。先前的研究已經結合光譜和紋理特征來提高表征病害的能力。這些研究證實了 VI、紋理特征(TF)及其組合對作物病害監測的有效性。然而,先前關于融合光譜和圖像特征檢測作物病害的研究大多是在葉片尺度上進行的,該方法在田間尺度上檢測病害的可行性尚未得到證實。
無人機遙感技術融合了靈活性高、成本低和操作簡便等優勢,彌補了傳統衛星遙感的不足之處。通過將遙感設備搭載在無人機上,可以快速采集高時空分辨率的空間遙感信息,隨后進行數據處理、建模及應用分析。這為農田智能化管理的發展提供了重要的技術支持。
為深入研究這一問題,應用采用搭載高光譜傳感器的無人機在不同空間尺度上監測小麥黃銹病的多個感染階段。研究目標是:(1)評估使用無人機高光譜圖像獲取的 VI、TF 及其組合在田間尺度上監測小麥黃銹病的性能;(2)確定使用無人機圖像監測小麥黃銹病的最佳圖像空間分辨率;(3)利用最佳特征和最佳空間分辨率建立田間尺度上感染早期、感染中期和感染晚期的黃銹病監測模型。


圖1 正常小麥葉片(左)和黃銹病小麥葉片(右)
2、技術思路與主要內容
2.1. 遙感影像獲取與預處理
采用配備高光譜成像傳感器的無人機系統(圖 2) 采集小麥圖像。無人機高光譜成像系統由四部分組成,包括六旋翼電動無人機系統 、高光譜數據采集系統、三軸穩定平臺和數據處理系統。

圖2無人機傳感器
無人機飛行高度為30 m,飛行速度為4 m/s,前向重疊度約80%,側向重疊度約60%。在30 m的飛行高度下,我們獲得了空間分辨率為1.2 cm,光譜分辨率為4 nm的高光譜圖像。無人機高光譜數據采集要求天氣晴朗,無風或風速較小。本研究中的圖像采集時段為上午11:00至下午13:00。
在小麥生長的關鍵時期,我們于4月25日、5月4日、5月11日、5月18日、5月24日和5月30日進行了6次基于無人機的高光譜觀測試驗,分別對應接種后7、16、23、30、36和42天(DPI)。圖3顯示了不同感染時期小麥黃銹病的發展情況。

圖3 不同時期小麥的照片
每次共獲取24個樣品,其中健康地塊獲取8個樣品,兩個接種地塊獲取16個樣品。6次試驗共獲取144個樣品,其中健康樣品57個,感染黃銹病樣品87個。
小麥黃銹病的嚴重程度用病情指數(DI)來描述。從每個1m2的地塊中隨機選擇40株小麥植株,以所選植株頂端第一片和第二片小麥葉片來評估病情嚴重程度。每個地塊共選取80片葉片計算DI。根據《國家農作物病害調查預報規范》(GB/T 15795-2011),葉片發病率分為9級(0%、1%、10%、20%、30%、45%、60%、80%、100%),其中0%為健康,1%為病害1級,10%為病害2級……100%為病害8級。黃銹病發病率評估在無人機采集圖像后立即進行,并由同一人員在專業人員的指導和監督下進行。
2.2. 實驗方法
采用PLSR建立小麥黃銹病監測模型。PLSR此前已被應用于作物生長監測和生理化學參數估計。PLSR是一種經典的建模方法,它包括三種方法的特點:PCA、典型相關分析和多元線性回歸分析。在PLSR中,變量的潛在結構是通過成分投影來確定的,該成分投影將預測變量和觀測變量投影到一個新的空間。因此,通過選擇最&優的潛在變量,將具有高數據冗余的原始變量轉換為少數變量。PLSR可以表示為描述預測變量和觀測變量之間關系的線性模型。
2.3. 高光譜像元獲取
最近鄰算法對原始圖像(1.2 厘米分辨率)進行重新采樣,以生成新圖像(3、5、7、10、15、20 厘米分辨率)。無人機影像中的地物包括小麥植株和土壤。
2.4. 采樣點
本研究采用NDVI閾值法從1.2 cm空間分辨率的圖像中提取小麥像素。該方法的過程如下:首先,設定最佳NDVI閾值。一般植被的NDVI范圍為0.3–1.0。經過多次嘗試,我們發現0.42的NDVI閾值可以準確地將小麥像素與背景像素分開。其次,將大于0.42的NDVI制作成用于提取小麥像素的掩模文件。最后,我們利用該掩模文件對原始圖像進行裁剪,得到僅包含小麥像素的圖像。為了保證不同空間分辨率圖像的小麥像素的一致性,利用原始圖像(1.2 cm)的NDVI閾值制作的掩模文件來提取其他空間分辨率圖像的小麥像素。僅包含小麥植株像素的高光譜圖像用于后續處理和分析選擇這些特定分辨率的原因是它們代表了大多數用于監測作物健康狀況的無人機圖像。圖 4 顯示了具有不同空間分辨率的無人機高光譜圖像的示例,該圖像是 4 月 25 日獲得的圖像中區域 A 的一部分。
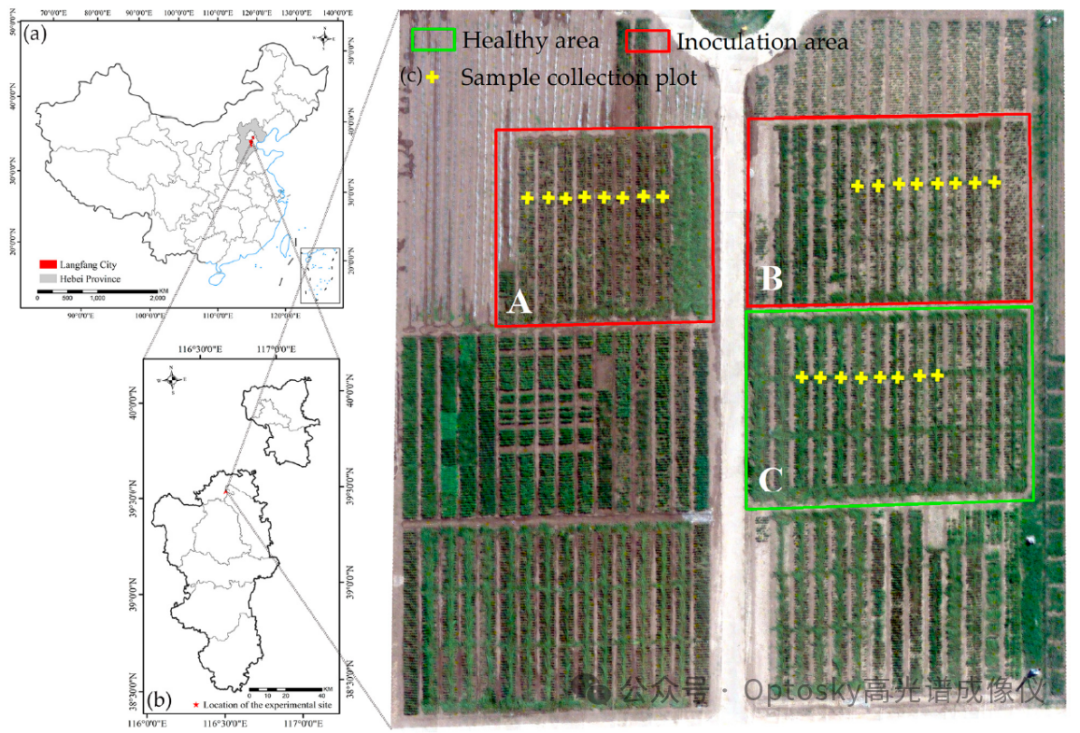
圖 4 不同空間分辨率的無人機高光譜圖像
3、 結論
本應用利用無人機高光譜影像在田間尺度上對小麥條銹病進行監測,采用不同的特征(VI、TF及其組合)建立小麥條銹病早期、中期和晚期的PLSR監測模型,并評估了不同影像空間分辨率(1.2 cm、3 cm、5 cm、7 cm、10 cm、15 cm和20 cm)對監測精度的影響。得到以下結論:(1)基于VI的模型在侵染中期的監測精度最高,基于TF的模型在侵染晚期的監測精度最高。但基于TF的模型不適用于侵染早期的條銹病監測,最高監測精度僅為R2為0.28。 (2) 在三個侵染時期,基于VI-TF的模型監測精度均高于基于VI和基于TF的模型,且在侵染后期監測精度最高(R2=0.88),此外,基于VI-TF的模型在侵染初期的監測精度也顯著提高,適用于病害的早期檢測。(3)空間分辨率對基于VI的模型監測精度影響較小,對基于TF的模型影響較大,基于VI-TF的模型監測條銹病的最佳空間分辨率為10cm。

圖5 識別結果

